Układy przeniesienia napędu (cz. VII): Dzielenie momentu napędowego

Fot. Wikimedia, Archiwum
Klasyczny mechanizm różnicowy
Podczas pokonywania zakrętów lub przejeżdżania przez nierówności nawierzchni wszystkie napędzane koła pojazdu wieloosiowego muszą toczyć się z różnymi prędkościami obrotowymi.
Gdy tor ruchu pojazdu ma kształt poziomego łuku, koła usytuowane dalej od geometrycznego środka krzywizny pokonują dłuższą drogę, czyli obracają się szybciej niż koła znajdujące się bliżej względem tegoż punktu. Krótsza jest także droga i mniejsza prędkość obrotowa tego z kół wewnętrznych lub zewnętrznych, które w danym momencie jedzie po płaskiej, równej nawierzchni, niż przejeżdżającego przez wypukłe bądź wklęsłe wyboje. Dlatego nawet przy napędzie kół jednej tylko osi konieczne staje się takie ich kinematyczne sprzężenie poprzez przekładnię główną z całym układem napędowym, by poruszały się oba ze zróżnicowanymi prędkościami obrotowymi, zachowując ciągłość przenoszenia momentu, a tym samym – sił obwodowych występujących na styku bieżników opon z podłożem. Brak takiego zróżnicowania wywoływałby znaczne naprężenia osi łączącej oba koła oraz ich niepożądane poślizgi.
ZOBACZ TAKŻE:
- Układy przeniesienia napędu (cz. VIII): Przekładnie główne i mosty napędowe
- Układy przeniesienia napędu (cz. VI): Bezstopniowe automatyczne skrzynie biegów
- Układy przeniesienia napędu (cz. V): Zautomatyzowane skrzynie biegów
- Układy przeniesienia napędu (cz.IV)
- Układy przeniesienia napędu (cz.III)
- Układy przeniesienia napędu (cz.II)
- Układy przeniesienia napędu (cz.I)
Mechanizmy różnicowe
Tak nazywa się specjalne konstrukcje przeznaczone do nadawania odmiennych prędkości kołom tej samej osi za pośrednictwem dwóch osobnych wałów, zwanych półosiami. Klasyczny mechanizm różnicowy działa w ten sposób, iż przy jeździe na wprost moment i prędkości obrotowe przenoszone są w równym stopniu na obie półosie napędowe, a w przypadku jazdy po łuku koło zewnętrzne może obracać się szybciej niż wewnętrzne, ponieważ przekładnia główna łączy się z półosiami poprzez układ czterech stożkowych kół zębatych. Dwa z nich (mniejsze), zwane satelitami, łożyskowane są symetrycznie na wspólnym wale osadzonym poprzecznie w obudowie mechanizmu połączonej sztywno z napędzanym kołem przekładni głównej. Oś wału satelitów przecina się pod kątem prostym z osią obrotu obudowy mechanizmu. Satelity zazębione są obustronnie z tzw. kołami koronowymi, te zaś łączą się każde ze swoją półosią. W trakcie różnicowania prędkości kół pojazdu różne są więc również prędkości obrotowe kół koronowych dzięki obracaniu się satelitów, chociaż napęd w tym czasie przekazywany jest równomiernie.
Mechanizmy różnicowe o takiej klasycznej konstrukcji działają zadowalająco we wszystkich rodzajach samochodów z napędem jednoosiowym, przeznaczonych do jazdy po utwardzonych nawierzchniach. W innych zastosowaniach odznaczają się jednak bardzo poważną wadą. Gdy podczas jazd terenowych albo po oblodzonych drogach jedno z kół osi zaczyna się ślizgać, na drugie, mimo jego normalnej przyczepności, przenoszony jest moment obrotowy zbyt mały, by pojazd mógł się w ogóle poruszać. Inne niedogodności w funkcjonowaniu takiego mechanizmu różnicowego mogą występować w trakcie jazdy po wyboistej drodze. Jeśli jedno z kół podskoczy, odrywając się od podłoża, cały moment obrotowy przenoszony jest właśnie na nie, co bardzo pogarsza stabilność jazdy (poślizgi) i powoduje przyspieszone zużycie całego mechanizmu napędowego (przeciążenia).
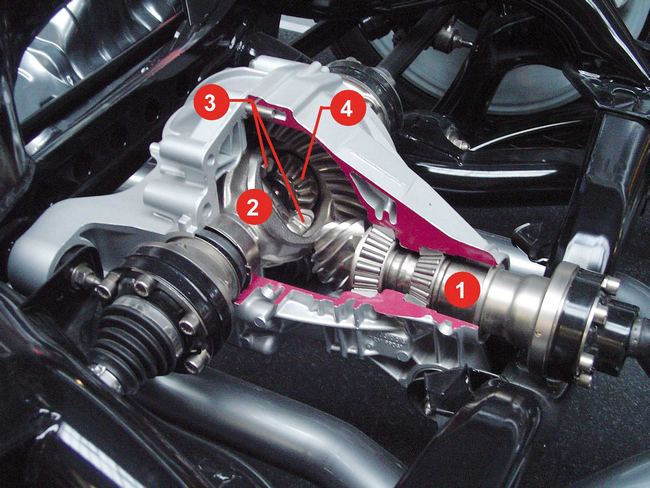
Klasyczny mechanizm różnicowy: 1. wał wejściowy (atakujący); 2. korpus mechanizmu; 3. satelity; 4. koło koronowe półosi (jedno z dwóch)
Przeciwdziałanie niekorzystnym cechom klasycznych mechanizmów różnicowych w przypadku ich stosowania w pojazdach terenowych lub rolniczych polega na ich okresowym blokowaniu sterowanym ze stanowiska kierowcy. Wykorzystywane są do tego celu blokady przesuwne lub cierne. Pierwsze łączą na zasadzie sprzęgła kłowego obudowę mechanizmu z jedną z półosi, więc nie można z nich korzystać podczas ruchu pojazdu. Drugie dokonują podobnego sprzężenia za pomocą sprzęgła ciernego stożkowego, tarczowego lub wielotarczowego, więc można ich używać także podczas jazdy, co dało podstawy do skonstruowania mechanizmów blokujących się lub zwiększających swe opory wewnętrzne samoczynnie przy określonym zróżnicowaniu prędkości obrotowych półosi. Samoczynne blokady mogą działać na zasadzie mechanicznej (wzajemne obrotowe przemieszczanie się półosi powoduje silniejszy docisk tarcz ciernych), lepkościowej (tarcze sprzęgła w trakcie ich wzajemnego ruchu „sklejane” są gęstniejącym płynem roboczym) albo elektronicznej (czujniki ABS sygnalizują nierównomierność obrotów kół, co powoduje elektromechaniczne włączenie blokady).
Międzyosiowe mechanizmy różnicowe
W samochodach z napędem na wszystkie osie niezbędne są rozwiązania kompensujące różne chwilowe prędkości kół przejeżdżających kolejno przez poprzeczne nierówności terenu. Użycie do tego celu klasycznych mechanizmów różnicowych nie daje zadowalających efektów, ponieważ ruszanie i jazda takim pojazdem na śliskiej nawierzchni są bardzo utrudnione, a niekiedy wręcz niebezpieczne. Dlatego w tak wyposażonych starszych modelach samochodów terenowych po prostu ograniczano konstrukcyjnie możliwość szybszego poruszania się z włączonym napędem wszystkich osi.
Współczesne międzyosiowe mechanizmy różnicowe wykonywane są w wersjach z blokadą sterowaną ręcznie (rzadko) lub samoczynnie (większość spotykanych rozwiązań) na wspomnianej już zasadzie lepkościowej lub elektronicznej. Międzyosiowe mechanizmy samoczynne w odróżnieniu od sterowanych ręcznie, a także tych dzielących napęd pomiędzy dwa koła tej samej osi, nie działają symetrycznie. Proporcje rozdziału wartości momentu obrotowego na poszczególne osie zależą od przyczepności do nawierzchni kół obydwu osi, a więc głównie od ich obciążenia. Na koła bardziej przyczepne kieruje się oczywiście większą część momentu, ale udział ten może się zmieniać także podczas jazdy poprzez odpowiednią regulację czułości samoczynnych blokad w granicach np. od 65:35 do 35:65 w warunkach ogólnie dobrej przyczepności.
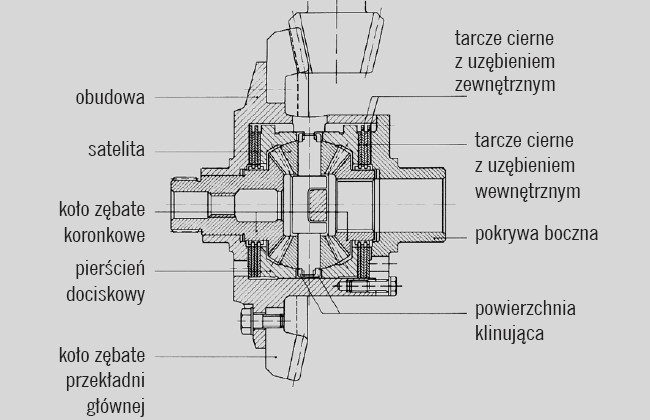
Mechanizm różnicowy samoblokujący
Innym rozwiązaniem międzyosiowego mechanizmu różnicowego jest konstrukcja typu Torsen, wykorzystująca przekładnie ślimakowe i działająca na zasadzie trwale zwiększonego tarcia wewnętrznego pomiędzy ślimakami i ślimacznicami. Rozdział wartości przekazywanego momentu obrotowego jest tutaj trwale niesymetryczny, z korzyścią dla osi bardziej obciążonej, czyli dysponującej lepszą przyczepnością kół do nawierzchni.
Skrzynie rozdzielcze
Zastosowanie w pojeździe napędu wieloosiowego wymaga umieszczenia pomiędzy skrzynią biegów a przekładniami głównymi poszczególnych osi dodatkowego mechanizmu rozdzielczego. We współczesnych pojazdach samochodowych stosowane są skrzynie rozdzielcze zapewniające stały (w samochodach osobowych i sportowych) lub tylko okresowo włączany (w niektórych samochodach terenowych i użytkowych) napęd wszystkich kół. W drugim z tych przypadków skrzynie rozdzielcze są często integrowane z przekładniami redukcyjnymi, zwiększającymi całkowite przełożenie układu przeniesienia napędu w celu pokonywania dużych oporów ruchu towarzyszących jeździe terenowej.
Okresowe włączanie napędu wszystkich osi w małych samochodach terenowych polega zwykle na wyborze przez kierowcę jednej z następujących możliwości:
- biegu szosowego z napędem kół tylnych,
- biegu szosowego z napędem kół tylnych i przednich,
- biegu terenowego z napędem kół tylnych i przednich.
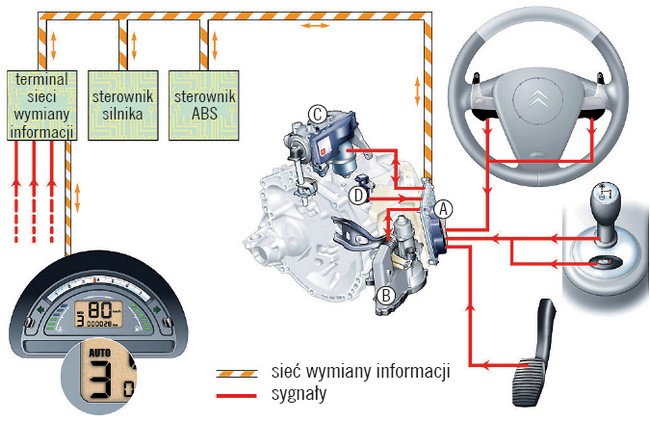
Zautomatyzowana skrzynia biegów ze sterowaniem elektrycznym (Citroën C3): A. sterownik skrzyni biegów B. silnik obsługujący sprzęgło; C. silnik wyboru i przełączania biegów; D.czujnik prędkości jazdy

0 komentarzy dodaj komentarz