Diagnostyka sieci CAN

Fot. Texa
CAN to skrót angielskiego terminu Controller Area Network, określającego typ przemysłowej sieci komunikacyjnej stosowany w motoryzacji od lat osiemdziesiątych, w 1993 r. ustandaryzowany normą ISO 11898.
Sieć komunikacyjna CAN charakteryzuje się:
- wysokim bezpieczeństwem przekazywania informacji i odpornością na błędy;
- prędkością transmisji sięgającą 1 Mbps;
- architekturą typu multi-master, gdzie każdy węzeł sieci ma takie same prawa i możliwości;
- nadawaniem informacji typu broad-cast, czyli bez potrzeby określania adresata.
Rodzaje sieci CAN
Według klasyfikacji SAE (Society of Automotive Engineers) standardy transmisji CAN można, zależnie od szybkości i realizowanych funkcji, przyporządkować do którejś z trzech głównych kategorii:
- klasa A – sieć nadwozia z niską prędkością transmisji (od 32,5 do 62,5 kb/s), niewielką ilością informacji i średnim czasem odpowiedzi 100 ms;
- klasy B/C – multiplexing międzysystemowy ze średnią prędkością transmisji (od 125 do 500 kb/s), średnią ilością informacji i średnim czasem odpowiedzi 10 ms;
- klasa D – szybki multiplexing z wysoką prędkością transmisji (od 500 do 1 Mb/s), ogromną ilością informacji i średnim czasem odpowiedzi 5 ms.
|
|
|
|
|
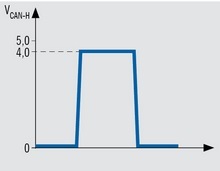
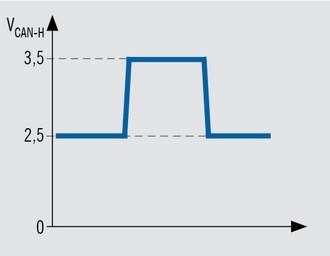
Fot. 1. Prawidłowy sygnał wyświetlony za pomocą modułu T-NET w urządzeniu Texa UNIProbe dla A-CAN linii H |
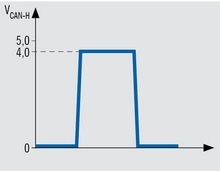
Fot. 2. Prawidłowy sygnał wyświetlony za pomocą modułu T-Net w urządzeniu Texa UniProbe dla B-CAN linii H |
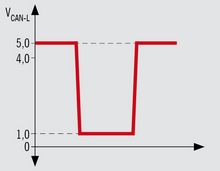
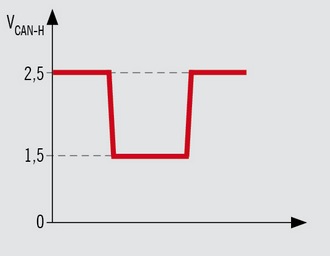
Fot. 3. Prawidłowy sygnał wyświetlony za pomocą modułu T-Net w urządzeniu Texa UniProbe dla B-CAN linii L |
Szyna danych CAN klasy A (dalej nazywana A-CAN) ma właściwość tolerowania problemów elektrycznych (fault tolerant), stosowana jest najczęściej w strefie nadwozia-komfortu. W odróżnieniu od szyn C-CAN i B-CAN, informacje przekazywane są w niej za pomocą jednego kabla (single wire), czyli nie występuje tu tzw. "skrętka" (para kabli). Właściwość fault tolerant nie oznacza, iż szyna może kontynuować pracę w przypadku zwarcia do masy lub spadu napięcia akumulatora, ale że każdy jej węzeł bez przeszkód wznawia swe działanie po usunięciu błędu. Ważną zaletą tego systemu jest także niski koszt węzła. Poza tym szyna A-CAN (single wire) charakteryzuje się małą wrażliwością na zakłócenia.
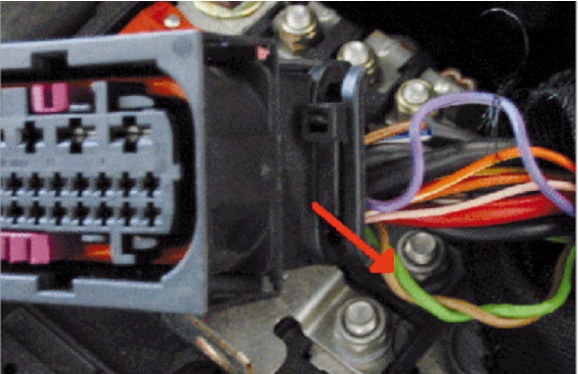
Fot. 4. Przykład przewodów CAN typu "skrętka"
Szyna danych CAN klasy B (dalej nazywana B-CAN) posiada średnią prędkość przesyłową o wartości około 90 kbit/s i nie wymaga stosowania podwójnego przewodu okręconego. Ten typ jest stosowany głównie w sekcji nadwozia oraz komfortu. B-CAN jest również siecią typu fault tolerant, czyli toleruje nieprawidłowości elektryczne. Oznacza to, że szyna jest zdolna do funkcjonowania również podczas występowania następujących usterek:
- zniszczenie przewodu CAN-H;
- zniszczenie przewodu CAN-L;
- zwarcie przewodu CAN-H do masy;
- zwarcie przewodu CAN-L do masy;
- zwarcie przewodu CAN-H do napięcia zasilania;
- zwarcie przewodu CAN-L do napięcia zasilania;
- zwarcie pomiędzy dwoma przewodami CAN-H i CAN-L.
|
|
|
|
Fot. 5. Prawidłowy sygnał wyświetlony za pomocą modułu T-Net w urządzeniu Texa UniProbe dla C-CAN linii H |
Fot. 6. Prawidłowy sygnał wyświetlony za pomocą modułu T-Net w urządzeniu Texa UniProbe dla C-CAN linii L |
W tych warunkach szyna nadal działa, nawet jeśli wzrasta prawdopodobieństwo wystąpienia błędu wzdłuż szyny, ponieważ informacje mają wyższy współczynnik błędu podczas przekazu, a więc nieuniknione jest zmniejszenie liczby bitów przesyłanych na sekundę. Jest to główny powód, dla którego nie stosuje się systemów fault tolerant w przypadku sieci połączonych z podzespołami bezpieczeństwa, gdzie występuje konieczność uzyskania informacji w czasie rzeczywistym.
Kontrole elektryczne powinny obejmować przedstawione na fotografiach poziomy napięcia. Jeśli wartości odczytane za pomocą modułu T-Net nie są zgodne, koniecznie należy skontrolować oporność linii oraz ich izolację. Dane oporności mogą zostać odczytane poprzez T-Net w trybie dynamicznym (podczas działania sieci). Ponieważ wartość końcowa tego systemu jest rozprowadzana w całej sieci, a wartość oporu różnicowego uzależniona jest od węzłów, z których złożona jest sieć, nie jest konieczne, aby każdy węzeł posiadał taki sam opór, ale aby opór łączny był rzędu kilkuset Ohm.
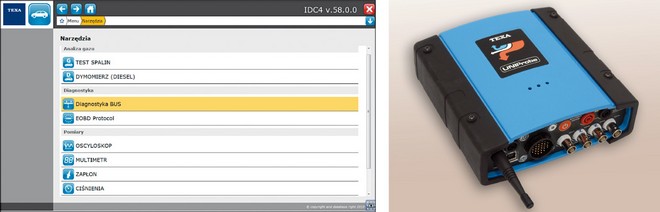
Fot. 7. Zakładka do wykonywania diagnostyki sieci komunikacyjnej CAN – program Texa IDC4e, urządzenie UNIProbe Firmy Texa
Sieć danych CAN klasy C posiada wysoką prędkość przesyłową (od 125 kbit/s do 1 Mbit/s). Wymaga stosowania podwójnego przewodu okręconego (tzw. "skrętki"). Ten typ szyny jest wykorzystywany zasadniczo do głównych systemów bezpieczeństwa, w których wymagana jest reakcja w czasie rzeczywistym. C-CAN nie jest siecią typu fault tolerant (nie toleruje uszkodzeń elektrycznych). Oznacza to, że szyna ta przestaje działać w przypadku przerwanych przewodów lub zwarcia.
|
|
|
Fot. 8. Odczyt prawidłowego przebiegu sygnału w sieci C-CAN |
|
|
|
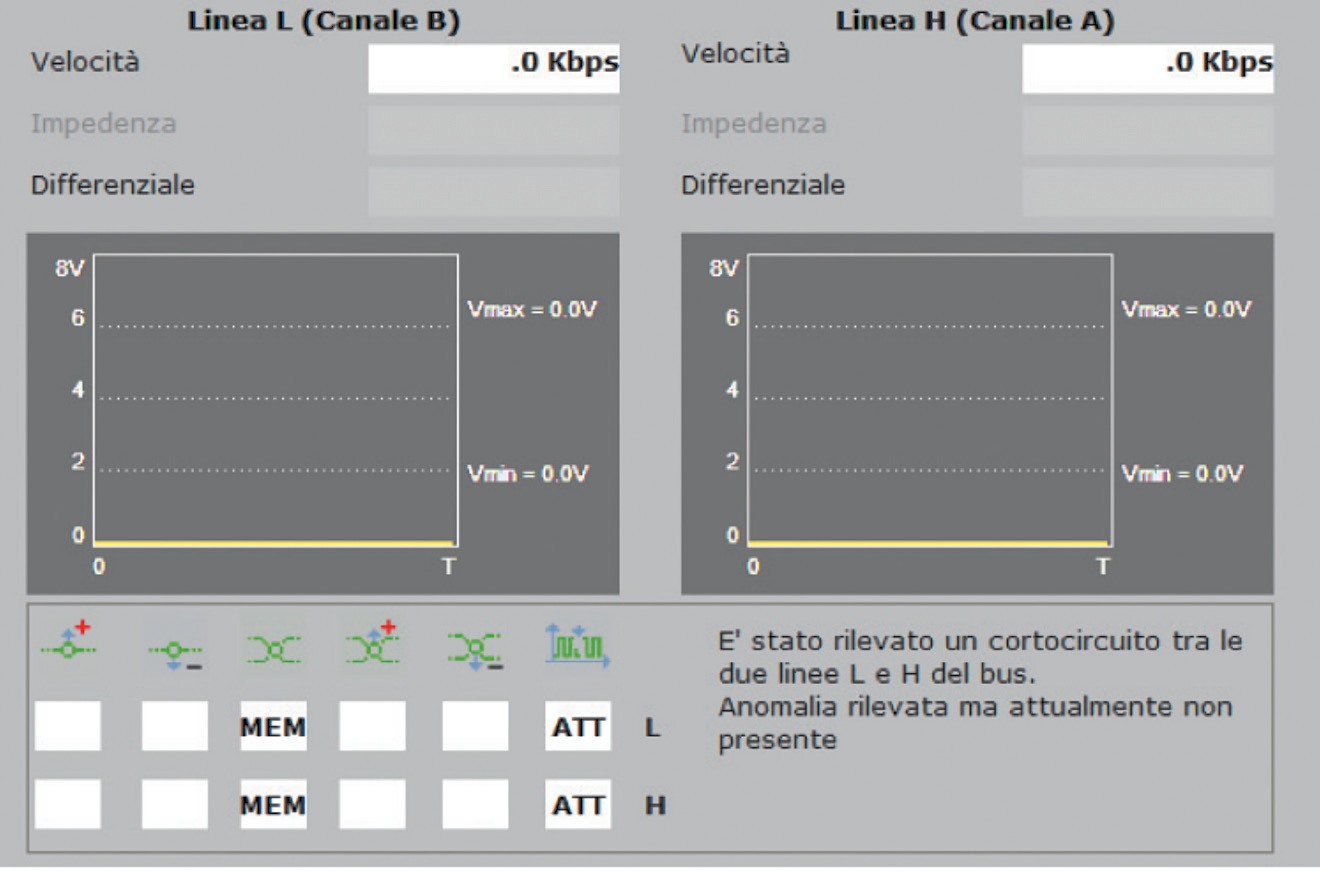
Fot. 9. Sygnał sieci C-CAN z informacjami o dawniejszym wystąpieniu zwarcia linii H z L, skutkiem którego był zanik sygnału |
|
|
|
Fot. 10. Pomiar wykonany podczas próby wymuszenia usterki |
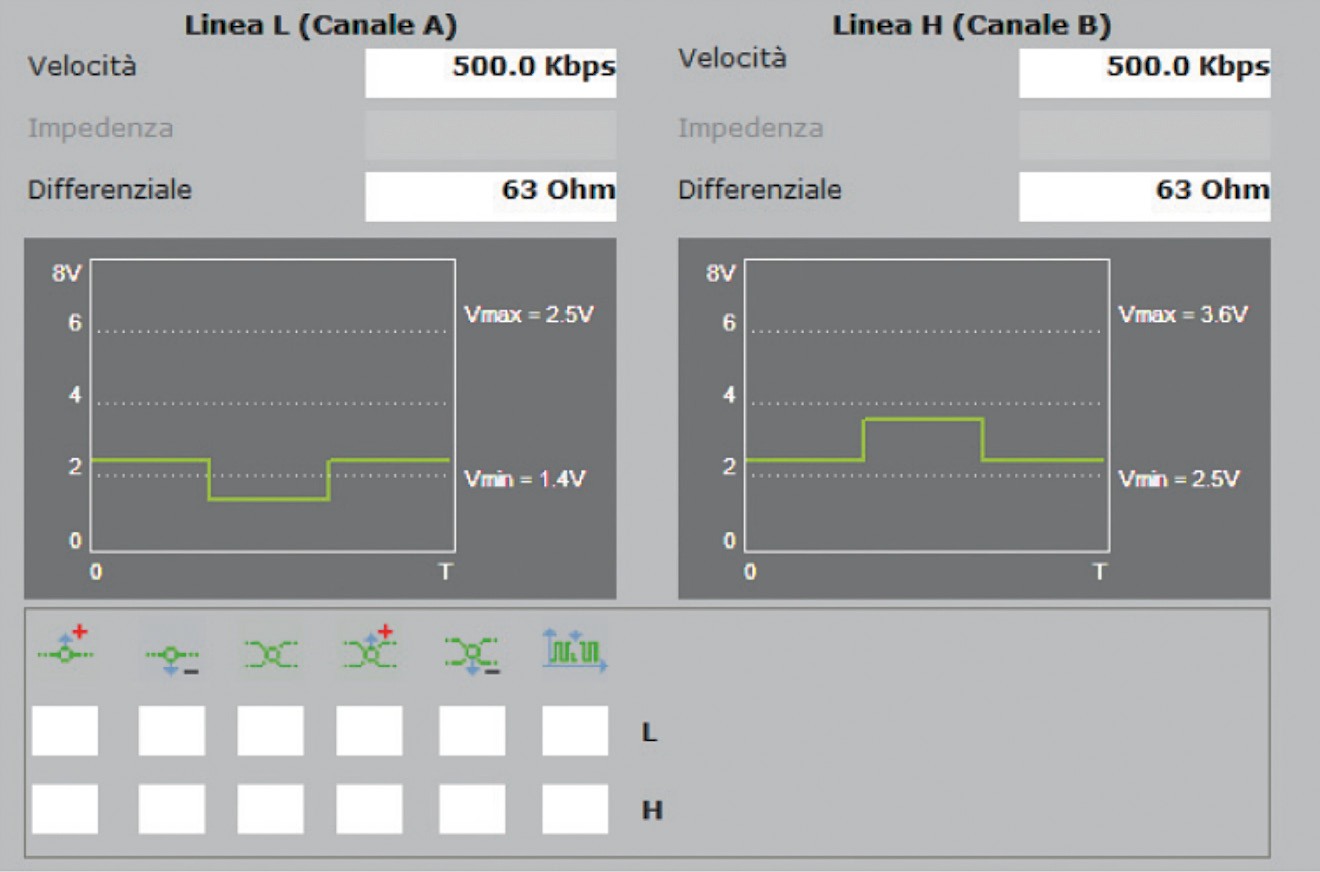
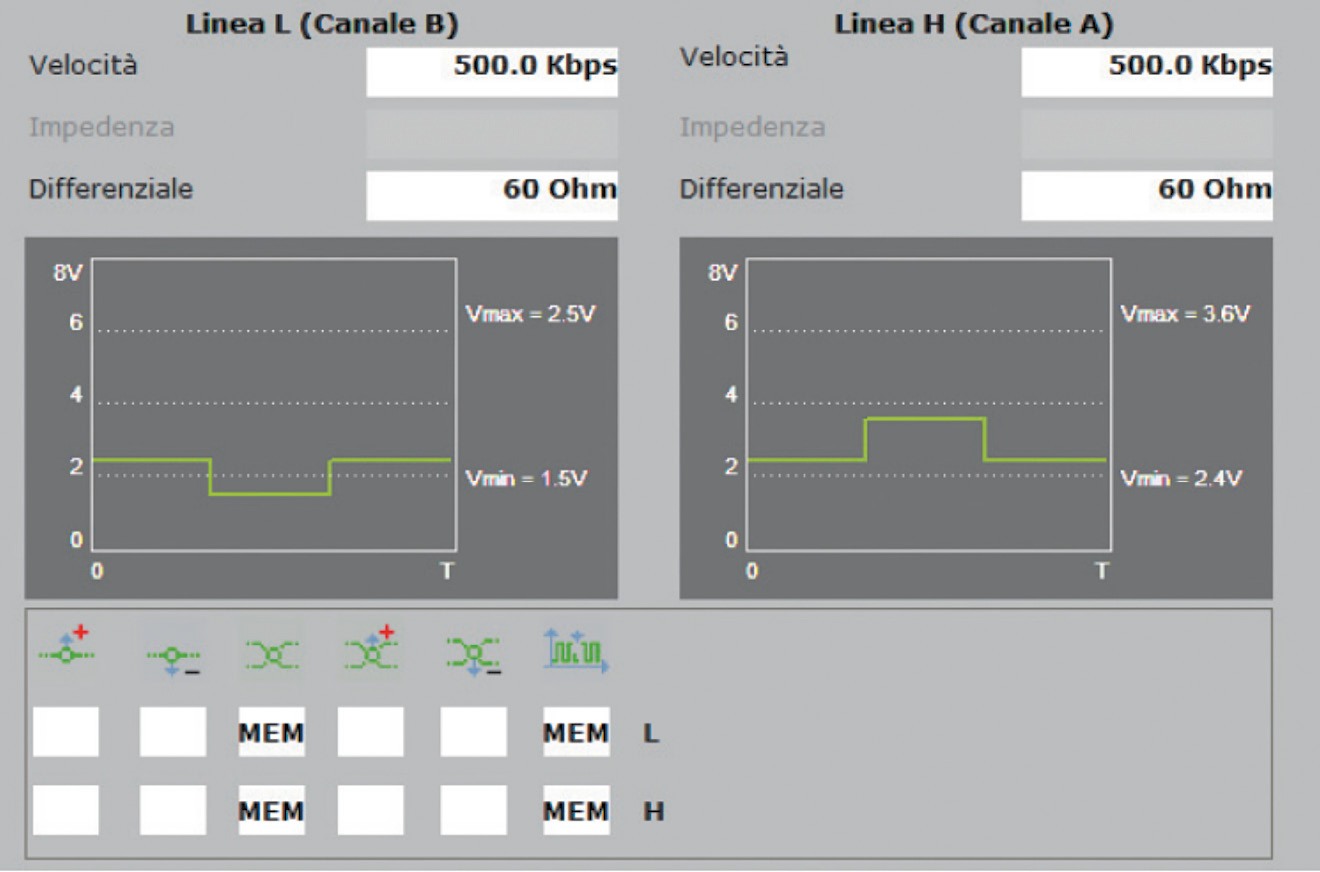
Sieć typu C-CAN wykorzystuje dwie linie nazywane L i H. Obie zamknięte są opornikami końcowymi, których wartość nominalna wynosi 120 Ohm każdy. Każdy węzeł jest zdolny wytworzyć napięcie różnicowe zawarte pomiędzy 1,5 V a 3 V zmierzone przy obciążeniu oporowym 60 Ohm (oporność "widziana" przez każdy węzeł).
Dwa oporniki końcowe mają za zadanie "dostosować" w sposób ogólny linię przesyłową (oczywiście przewód podwójny) i zlokalizowane są wewnątrz węzłów sieci. Na przykład w Alfa Romeo 147 oporniki końcowe 120 Ohm znajdują się w węźle komputera pojazdu oraz w węźle ABS.
Pozyskiwanie sygnału cyfrowego – TNET
W przypadku wystąpienia błędu komunikacji CAN z jednym z modułów podłączonych do sieci, należy wykonać pomiary specjalistycznym urządzeniem pomiarowym, np. za pomocą UniProbe Texa z funkcją T-Net. Poniżej opisana zostanie procedura diagnostyki sieci CAN za pomocą modułu T-Net na przykładzie sieci C-CAN.
Po wyborze opcji diagnostyki BUS moduł T-Net poprosi o ustawienie rodzaju (typu) sieci poddawanej badaniu. Ma to na celu dostosowanie oprogramowania do badanej sieci i jej funkcji, aby uniknąć tym samym nieprawidłowości oceny wyświetlanych wyników diagnozy. Sieć można rozpoznać po prędkości transmisji danych od 500 kb/s oraz po danych różnicowych (równolegle między nimi są dwie rezystancje końcowe, każda po około 120 Ohm).
Diagram odnoszący się do prawidłowego funkcjonowania sieci C-CAN pokazany został na fot. 8. Na następnym diagramie (fot. 9) mamy do czynienia z sytuacją, w której dwie linie C-CAN (H oraz L) są zwarte. W dolnej jego części widoczny jest komunikat Mem (Memorized), oznaczający błędy występujące sporadycznie lub już nieobecne. W tym wypadku Mem znajduje się w polach komunikujących zwarcia w sieci oraz braku sygnału (zwarcie między liniami resetuje bowiem przesyłanie sygnału).
Właśnie przypadki związane z błędami sporadycznymi są najtrudniejsze w diagnozowaniu, ponieważ warunki powodujące awarię (temperatura, naprężenia mechaniczne, tarcie itp.) nie zawsze pojawiają się ponownie. W takich sytuacjach możliwości oferowane przez system T-Net okazują się niezastąpione. Należy wpiąć się nim w sieć w punktach, w których podejrzewamy usterkę i wymuszając zmiany warunków pracy, poprzez np. ogrzewanie lub mechaniczne pobudzanie tych punktów i odcinków sieci, starać się usterkę tę wywołać. Chwilowe zaniki sygnału mogą pozostać niezauważone przez oko operatora, lecz nie przeoczy ich T-Net. Dzięki temu można otrzymać odpowiedź identyfikującą rodzaj uszkodzenia i dodatkowo określającą, czy błąd jest sporadyczny, czy też stały. Ułatwia to wykrycie konkretnej usterki.
Udane wymuszenie usterki zasygnalizowane jest przez T-Net jako zanik sygnału na obu liniach. Należy wówczas prześledzić odcinek wiązki (skrętki) pod kątem uszkodzeń mechanicznych. Ich wyeliminowanie powinno przywrócić prawidłową transmisję danych.
Ostatnim krokiem procedury diagnostycznej jest próba wyczyszczenia pamięci błędów w sterownikach, w których wcześniej odczytywane były komunikaty o awarii sieci CAN.
W artykule wykorzystano materiały z oprogramowania diagnostycznego IDC4 Car Texa

-
2025-04-20 13:26
nie działa
Andrzej Łukaszewicz
Nie jestem elektrykiem !!. Temat dotyczy Jaguar S Type z 1999 r. Zrobiłem dodatkową lampę pozycja / stop , na ledach , wszystko działało poza samochodem . Wlutowałem ją do tylnej lampy samochodu i system - chyba CAN jej nie widzi . Co można zrobić ??????
1 komentarzy dodaj komentarz