System Night Vision

Fot. Texa
Kamery termowizyjne znane są od wielu lat – początkowo wykorzystywane do celów wojskowych, szybko zyskały nowe zastosowania. Dziś można je spotkać nawet w smartfonach.
Każdego roku, szczególnie w okresie jesienno-zimowym, dochodzi do dużej liczby wypadków z udziałem pieszych i rowerzystów, z których najwięcej zdarza się po zmroku. Nie każdy pieszy respektuje obowiązek noszenia specjalnych odblasków, które znacząco poprawiają jego widoczność.
Oprócz sprawnego oświetlenia, kierowcy przychodzi z pomocą wyposażony w specjalną kamerę termowizyjną system Night Vision. Jego kamera wykrywa obiekty o wyższej od otoczenia temperaturze, a specjalne oprogramowanie pozwala rozpoznać, z czym mamy do czynienia. Przede wszystkim chodzi o wyodrębnienie na przekazywanym kierowcy obrazie sylwetki człowieka lub zwierzęcia. System Night Vision wykrywa te obiekty, jeszcze zanim znajdą się one w zasięgu reflektorów, dając kierowcy czas na reakcję.

Rys. 2. obszar wyświetlania obrazu z kamery termowizyjnej w samochodzie Audi
Kamera termowizyjna, podobnie jak radar w znanych już systemach ADAS, do poprawnego działania wymaga odpowiedniej kalibracji. Do rozkalibrowania dochodzi np. na skutek stłuczki lub innych zdarzeń, w których zmianie uległa pozycja czujnika termowizyjnego lub wystąpiła inna usterka elementów wchodzących w skład systemu. Ostatnią czynnością, którą należy wykonać po naprawie, jest kalibracja kamery termowizyjnej.
Procedurę tę opiszemy na przykładzie samochodu Audi A6 4K2 z 2018 roku.
Potrzebne narzędzia

Rys. 3. Texa RCCS3 BT, Night Vision, interfejs diagnostyczny TXT Multihub
Do przeprowadzenia kalibracji niezbędne jest wyposażenie warsztatu w odpowiednie narzędzia i oprogramowanie.
Posłużymy się oprogramowaniem Texa IDC5 Car oraz interfejsem diagnostycznym Texa Navigator Multihub. W przypadku kalibracji pojazdu z grupy VGA potrzebny jest dodatkowy przyrząd Texa Night Vision VGA, mocowany na prowadnicy zestawu RCCS3 BT (wykorzystywanego do kalibracji kamer i radarów – rys.3).
Procedura
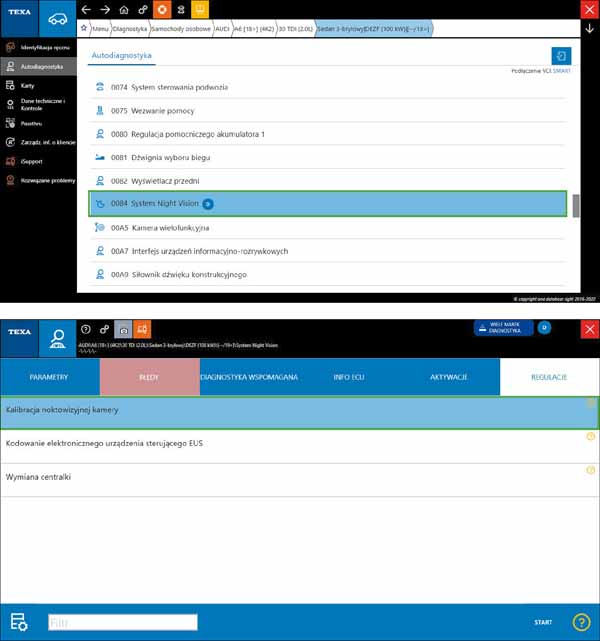
Rys. 4. Zainicjowanie procedury kalibracji w oprogramowaniu IDC5 Car (krok 2)
Jeśli po naprawie wykonanej zgodnie z wytycznymi producenta system pokładowy oraz błędy w sterowniku Night Vision wskazują na konieczność przeprowadzenia kalibracji, wykonujemy ją w dwóch kolejnych krokach.
Krok 1. Odpowiednie wypozycjonowanie zestawu RCCS3 BT względem pojazdu oraz kamery termowizyjnej.
Krok 2. Zainicjonowanie procedury kalibracji za pomocą oprogramowania diagnostycznego (rys. 4).
Krok 1. jest bardzo ważnym etapem całego procesu, ponieważ odpowiednie i precyzyjne ustawienie RCCS3 względem pojazdu ma decydujący wpływ na ostateczne powodzenie kalibracji. W oprogramowaniu IDC5 znajdziemy kartę techniczną omawiającą cały proces pozycjonowania. Dzięki wyposażeniu RCCS3 w dalmierze elektroniczne (komunikujące się z RCCS3 po Bluetooth) ustawienie przyrządu jest wyjątkowo proste. Trzeba jedynie wykonywać kolejne kroki instrukcji do osiągnięcia „zielonych” wskaźników na specjalnej wizualizacji przedstawionej w oprogramowaniu IDC5 (rys. 5).

Rys. 5. Zrzut ekranu z pozycjonowania zestawu RCCS3 – zielone oznaczenia kół oznaczają uzyskanie prawidłowej pozycji
Podczas pozycjonowania bardzo ważne jest postępowanie zgodnie z wyświetlanymi wytycznymi:
- pojazd musi być ustawiony na równym podłożu;
- kierownica ustawiona w pozycji centralnej, a koła ustawione na wprost;
- ustawienie zawieszenia w tryb komfort/normal (o ile pojazd ma taką funkcję);
- należy sprawdzić ciśnienie w ogumieniu, a w razie potrzeby skorygować je do wartości wskazanej przez producenta;
- bagażnik oraz przedział pasażerki musi być pusty (pojazd nieobciążony);
- załączony hamulec postojowy;
- brak osób w pojeździe;
- pełny zbiornik paliwa;
- nominalna ilość płynów eksploatacyjnych.
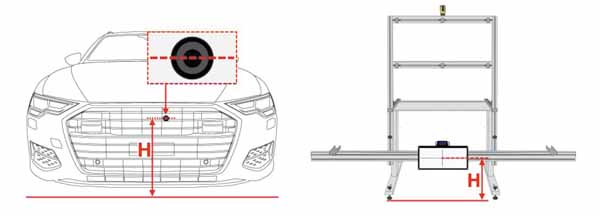
Rys. 6. Ustawianie wysokości Night Vision
Gdy RCCS3 jest już ustawiony zgodnie z instrukcją, można przystąpić do kroku drugiego, aby uzyskać odpowiednią wysokość urządzenia Texa Night Vision względem kamery termowizyjnej (rys. 6). W tym celu należy zmierzyć wysokość, na której zamontowana jest kamera, i ustawić taką samą wysokość urządzenia NV Texa.

Rys. 7. Aby kalibracja przebiegła prawidłowo, urządzenie Texa Night Vision
musi uzyskać odpowiednią temperaturę
Następnie można włączyć urządzenie Texa Night Vision. Urządzenie musi osiągnąć temperaturę roboczą 70oC. (rys. 7).
W dalszej kolejności, o ile pojazd umożliwia taką funkcję, należy aktywować kamerę noktowizyjną na zestawie wskaźników w pojeździe (gdy nie ma możliwości aktywacji kamery na zestawie wskaźników, należy wykonać procedurę, która uwzględnia brak możliwości aktywacji kamery).

Rys. 8. Obraz kamery termowizyjnej z obszarami kalibracyjnymi
Głównym zadaniem jest zlokalizowanie linii błękitnej oraz niebieskiej w przybliżonym środku wyświetlanych zielonych ramek. Na rys. 9 przedstawiono prawidłowy obraz uzyskany po poprawnym zamontowaniu kamery termowizyjnej. W przypadku, gdy linie nie znajdą się w środku zielonej ramki, ustawienie kamery uznawane jest za nieprawidłowe (rys. 10).
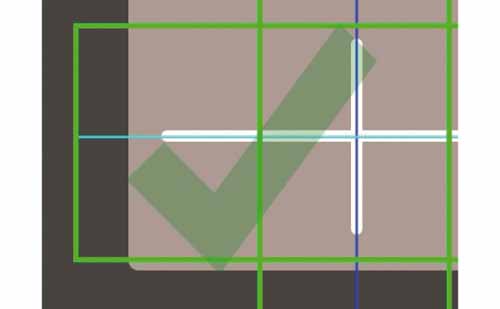
Rys. 9. przykład poprawnego wyświetlenia urządzenia kalibracyjnego
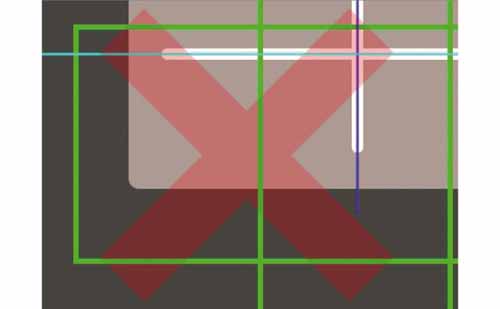
Rys. 10. Przykład niepoprawnego wyświetlenia urządzenia kalibracyjnego
Po wykryciu błędnego ustawienia kamery do dyspozycji pozostaje jedna śruba regulacyjna, umożliwiająca regulację w poziomie. Gdy odczytana jest niepoprawna regulacja w pionie, należy sprawdzić poprawność mocowania kamery (możliwe jest błędne mocowanie pasa przedniego).
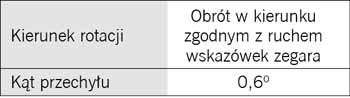
Rys. 11. Tabela w oprogramowaniu IDC5 wskazująca pochylenie kamery
– po osiągnięcia poziomu przez regulację śruby regulacyjnej
procedura przechodzi dalej
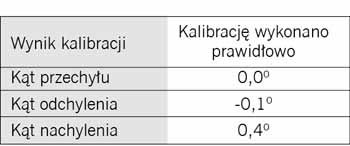
Rys. 12. Tabela wyświetlona po wykonaniu kalibracji
Po wykonanej kalibracji wyświetlane są wyniki kalibracji (rys. 12).
W przypadku, gdy zestaw RCCS3 BT oraz urządzenie Texa Night Vision zostały właściwie wypozycjonowane, procedura kalibracji nie powinna przysporzyć problemu.
Zachęcamy do zapoznania się z innymi możliwościami zestawu Texa RCCS3 BT – takimi jak kalibracja kamer i radarów w systemach ADAS.
W razie jakichkolwiek pytań pomocą służy zespół wsparcia technicznego Texa Call Center – tel. 32 364 18 88.

0 komentarzy dodaj komentarz
Wasi dostawcy
Podobne
Polecane
- Rozwiązania „Sidem NXT” i uczestnictwo firmy w targach Automechanika 2026
- Delphi uruchamia wyzwanie „Big Build”, aby pokazać najlepsze talenty wśród warsztatów w Polsce
- Obsługa automatycznych skrzyń biegów i rozszerzenie działalności z Gear Tronic III
- Pik serwisowy - jak zamienić wiosenne kolejki w realny zysk warsztatu?