Geometria wieloosiowych układów jezdnych

Fot. Hunter, archiwum
Oprogramowanie systemu zainstalowane jest w komputerze klasy PC
Znaczna część poważnych wypadków z udziałem sa- mochodów ciężarowych powodowana jest przez rozmaite nieprawidłowości ustawienia osi i kół. Ich nagminność stwierdzają też stacje kontroli pojazdów.
Z prawidłowym ustawieniem geometrii układu jezdnego samochodu mamy do czynienia wówczas, gdy wszystkie jego koła przyjmują w każdej fazie jazdy właściwy kierunek i toczą się bez poślizgu, utrzymując samochód na wyznaczonym przez kierowcę torze jazdy. Z przeprowadzonych badań wynika, że około 70% trzyosiowych samochodów ciężarowych ma nieprawidłowo ustawione podwójne osie kół tylnych.
Zła geometria układu jezdnego powoduje:
- nadmierne zużycie opon,
- podwyższone zużycie paliwa wskutek zwiększonych oporów toczenia,
- złą sterowność samochodu,
- szybkie męczenie się kierowcy i osłabienie jego koncentracji,
- przedwczesne zużywanie się podzespołów jezdnych i zawieszenia.
 |
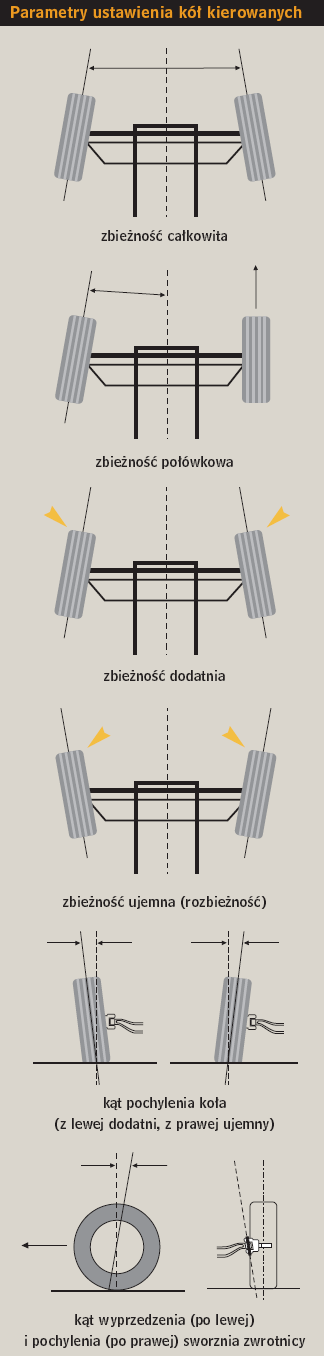
Prawidłowy stan pojazdu określają przepisy dotyczące okresowych badań diagnostycznych jego podzespołów. Zakres tych badań obejmuje ocenę zgodności rzeczywistych parametrów pojazdu z technicznie dopuszczalnymi, zwłaszcza w odniesieniu do mechanizmów odpowiedzialnych za bezpieczeństwo ruchu drogowego. Obecnie kwestie te regulowane są przez Rozporządzenie Ministra Infrastruktury z dnia 16 grudnia 2003 r. Dz. U. Nr 227 poz. 2250 r. w sprawie zakresu i sposobu przeprowadzania badań technicznych pojazdów oraz wzorów dokumentów stosowanych przy tych badaniach. Wpływ poszczególnych parametrów geometrii na zachowanie pojazdu Bezpieczny pojazd musi utrzymywać samoczynnie prostoliniowy kierunek jazdy, zapewniać poprawne manewrowanie oraz skuteczne zatrzymywanie w kry- tycznych sytuacjach drogowych. Spełnienie tych wszystkich warunków zależy w znacznej mierze od dobrego kontaktu opony z nawierzchnią drogi, a ten z kolei - od prawidłowej geometrii układu jezdnego. Oceniane przy tym parametry geometryczne to przede wszystkim kąty: zbieżności (lub rozbieżności) kół jednej osi, pochylenia koła, wyprzedzenia i pochylenia osi sworznia zwrotnicy, skrętu koła zewnętrznego i wewnętrznego osi kierowanej. |
|
Rys.: Hunter 811/DSP 500T Rys. poniżej, od lewej: uchwyty głowic, przenośny panel do zdalnej obsługi |
 |
 |
Rezultatem nieprawidłowej zbieżności są zwiększone opory ruchu pojazdu, zmniejszona przyczepność bieżników do nawierzchni oraz nadmierne zużywanie się zewnętrznych lub wewnętrznych krawędzi opony.
|
|
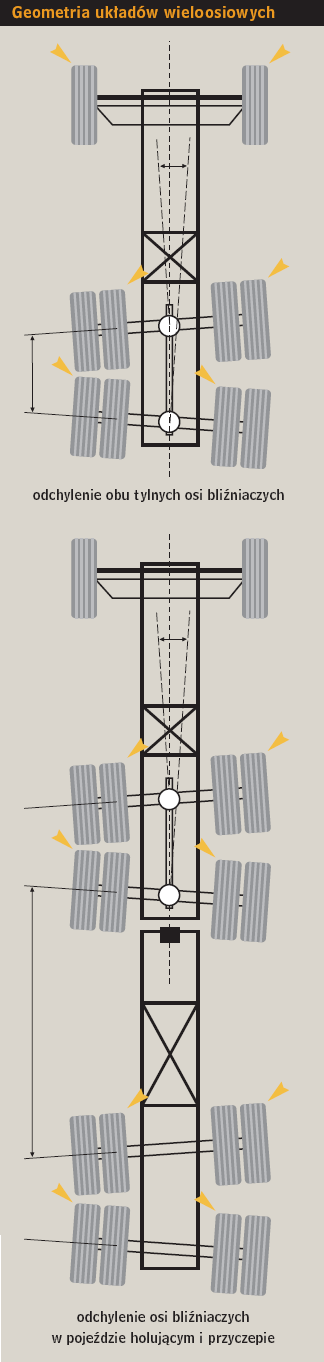
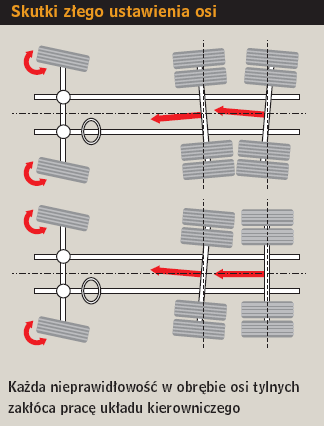
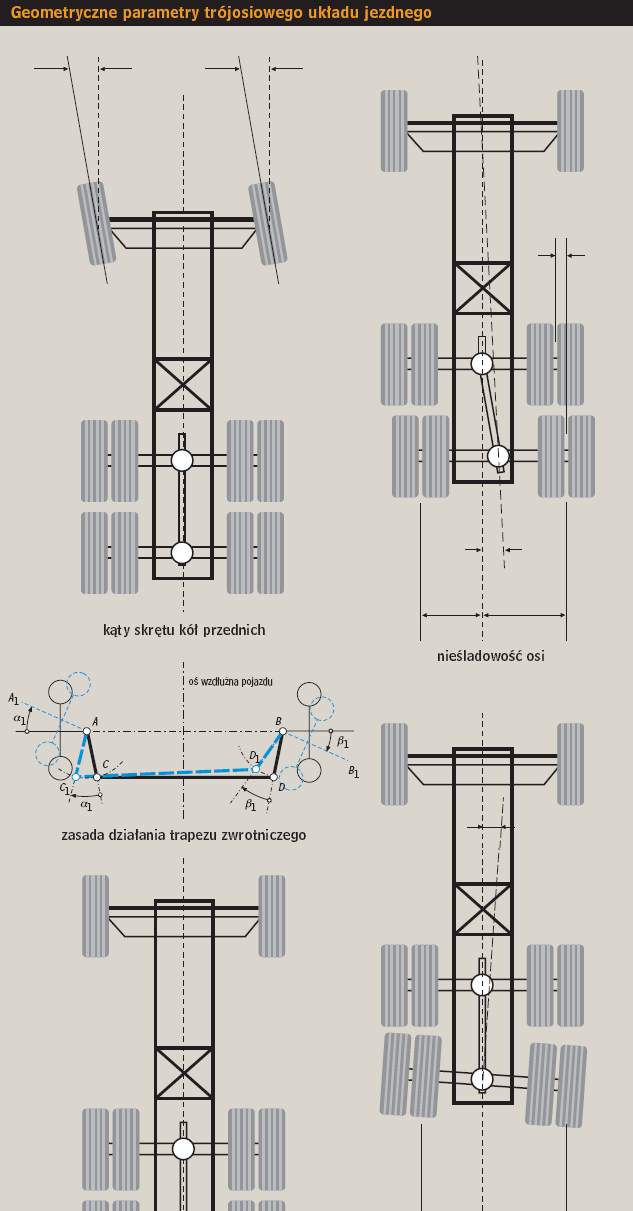
Kąt pochylenia koła tworzą: płaszczyzna pionowa i płaszczyzna obrotu koła, przecinające się w punkcie środkowym styku bieżnika z nawierzchnią. Kąt ten może przybierać wartości dodatnie, gdy górna część koła jest oddalona bardziej niż dolna od pionowej, wzdłużnej płaszczyzny symetrii pojazdu. W przeciwnym wypadku mamy do czynienia z pochyleniem ujemnym. Niewłaściwy kąt pochylenia koła powoduje nierównomierne zużycie krawędzi opony, co może mieć negatywny wpływ na stabilność ruchu pojazdu, skuteczność hamowania i ogólną żywotność ogumienia. Kąt wyprzedzenia osi sworznia zwrotnicy mierzony jest w płaszczyźnie wzdłużnej, względem pionowej prostej przechodzącej przez środek pola styku bieżnika z nawierzchnią. Teoretycznie również ten parametr może przybierać wartości dodatnie, ujemne oraz wartość zerową. W praktyce jednak stosowane jest wyłącznie wyprzedzenie dodatnie, przy którym oś sworznia przecina płaszczyznę drogi przed punktem środkowym styku tej płaszczyzny z bieżnikiem koła. Kąt wyprzedzenia ma duży wpływ na stabilność prostoliniowego ruchu pojazdu oraz ułatwia powrót kół kierowanych do pozycji neutralnej przy wychodzeniu z zakrętu. Nieprawidłowe wartości tego kąta powodują samoczynne zmiany kierunku jazdy (lawirowanie lub ściąganie na jedną stronę), drgania i nadmierny opór wyczuwany na kole kierownicy oraz nierównomierne zużywanie się bieżników opon kół kierowanych. Kąt pochylenia osi sworznia zwrotnicy mierzony jest w płaszczyźnie poprzecznej, względem prostej pionowej przechodzącej przez punkt przecięcia osi sworznia z płaszczyzną drogi. Wartość tego kąta wpływa na tzw. promień zataczania, czyli na ogólną charakterystykę układu kierowniczego. Różnica kątów skrętu koła zewnętrznego i wewnętrznego wynika z zastosowania trapezowego układu zwrotniczego i musi być dostosowana do rozstawu kół osi kierowanej oraz do krzywizny pokonywanego zakrętu (im większy rozstaw, tym większa różnica kątów; im większy promień krzywizny, tym mniejsza różnica kątów). Dzięki temu rozwiązaniu koła osi kierowanej mogą toczyć się bez poślizgu bocznego po dwóch łukach o różnych promieniach. Maksymalne kąty skrętu obu kół jednej osi w prawo i w lewo powinny być jednakowe i zgodne z instrukcją serwisową danego modelu pojazdu. Nieprawidłowości wieloosiowego układu jezdnego Wyjściowym kryterium oceny układu jezdnego każdego pojazdu jest przebieg jego osi podłużnej. Dlatego należy ją precyzyjnie wyznaczyć przed sprawdzeniem pozostałych elementów geometrii. Przy prawidłowym jej przebiegu w pojeździe z dwiema osiami tylnymi prosta poprowadzona przez środki symetrii osi przedniej i tylnej osi bazowej powinna się pokrywać z osią symetrii podłużnej ramy nośnej. Względem osi podłużnej układu jezdnego wyznacza się w każdym precyzyjnym systemie pomiarowym np.: opisane uprzednio zbieżności połówkowe, odchylenia kątowe, a także poprzeczne przesunięcia osi, powodujące odpowiednio: konieczność krekty toru jazdy układem kierowniczym i nieprawidłową śladowość kół. Kąt odchylenia jednej z tylnych osi bliźniaczych, zwany również kątem znoszenia, mierzony jest pomiędzy linią symetrii tej osi a geometryczną linią podłużnej symetrii pojazdu. Gdy wartość tego kąta jest różna od zera, żadne z kół nie toczy się swobodnie, na wszystkich występuje większy lub mniejszy poślizg boczny, zmniejszający przyczepność i stabilność prostoliniowego kierunku jazdy. Różny od zerowego kąt wzajemnego odchylenia osi podwójnych pogłębia uprzednio opisane zjawiska negatywne, a dodatkowo zakłóca działanie układu kierowniczego w ten sposób, że podczas pokonywania łuków drogi zgodnych z rzeczywistym układem wszystkich czterech kół występuje zjawisko nadsterowności, a w sy- tuacji odwrotnej – podsterowności. Skutkiem tej usterki jest również nadmierne zużycie ogumienia. |

Rys.: Regulację geometrii naczep i przyczep o zwielokrotnionej liczbie osi zaczynamy od ustawienia tylnej osi bazowej względem czopa zaczepu
Gdy nieprawidłowe wzajemne odchylenia osi podwójnych występują równocześnie w ciągniku siodłowym i współ- pracującej z nim naczepie, oba te pojazdy poruszają się niestabilnie i nieśladowo, a przez to zajmują nadmiernie szeroki pas drogi. Wszystkie koła zestawu pracują wówczas z bocznym poślizgiem osłabiającym przyczepność, zakłócającym kierowanie i hamowanie, znacznie przyspieszającym ogólne zużycie ogumienia.
 |
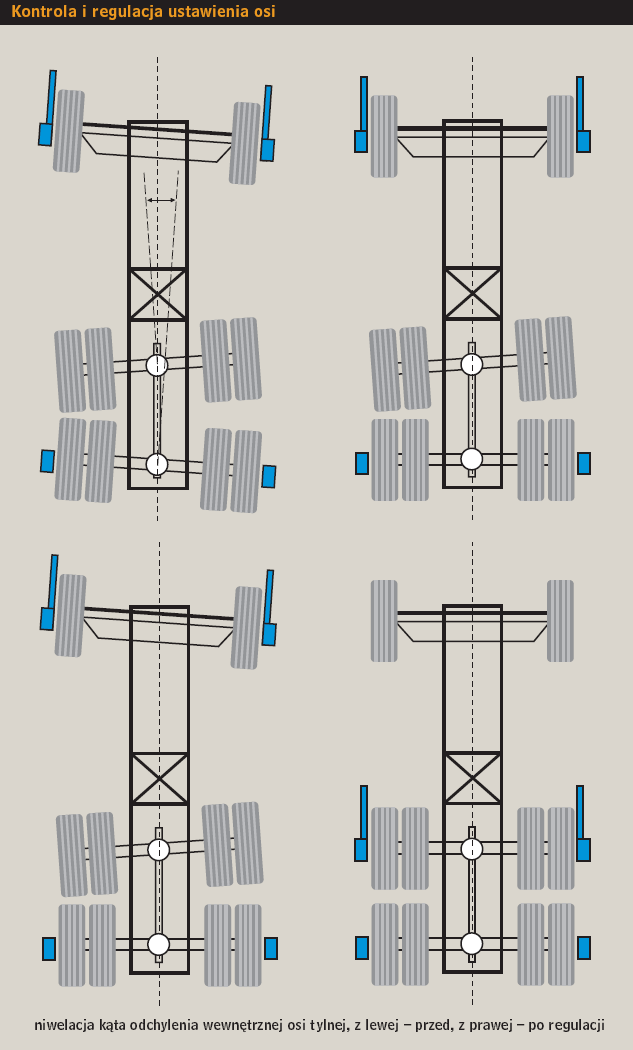
Z nieprawidłową śladowością kół mamy do czynienia wówczas, gdy jedna lub więcej osi ma niesymetryczne (poprzecznie przesunięte) zamocowanie do ramy pojazdu. Kontrola i regulacja geometrii układów wieloosiowych Pomiary geometrii tego rodzaju układów jezdnych można przeprowadzać urządzeniami różnych producentów, pod warunkiem ich fabrycznego przystosowania do obsługi pojazdów o dopuszczalnej masie całkowitej powyżej 3500 kg. Najwygodniejsze są urządzenia skomputeryzowane i wyposażone w zintegrowane oprogramowanie. Do tej grupy należy Hunter 811 / DSP 500T/DSP 600, użyty do przeprowadzenia opisanych tu badań wybranych modeli samochodów ciężarowych. Urządzenie to umożliwia za pomocą zestawu czterech cyfrowych głowic pomiarowych kontrolę geometrii ustawienia kół o średnicach obręczy od 10 do 28 cali, czyli stosowanych we wszelkich rodzajach samochodów (osobowych, dostawczych, ciężarowych), autobusów, przyczep i naczep. Oprogramowanie uwzględnia 36 konfiguracji osi pojazdów ciężarowych, w tym modele mające do trzech osi kierowanych. Dane z głowic pomiarowych przekazywane są do jednostki centralnej metodą cyfrowej, bezprzewodowej transmisji danych. Spróbujmy wykorzystać opisany wyżej system do korekty niewłaściwie ustawionych kół trzyosiowego samochodu ciężarowego. Najpierw w komputerowej bazie urządzenia wyszukujemy procedurę ustawiania geometrii odpowiednią dla danego typu pojazdu, zaczynając od analizy konfiguracji jego osi. Zgodnie z wybraną procedurą montujemy głowice elektroniczne do kół drugiej osi tylnej (zwanej bazową) oraz do osi kierowanej. Następnie przeprowadzamy kompensację bicia bocznego tych kół, na których zamontowane są głowice. Potem dokonujemy pomiaru osi bazowej w celu ustalenia jej kąta znoszenia i za pomocą mechanizmów regulacyjnych, dostępnych w tym modelu samochodu, doprowadzamy kąt znoszenia do wartości zerowej. Jednocześnie ustawiamy środek rozstawu kół osi bazowej w osi symetrii podłużnej ramy. W dalszej kolejności stawiamy prawidłowo przednią oś kierowaną względem wyregulowanej już tylnej osi bazowej. Na koniec pozostaje skontrolować i odpowiednio ustawić pierwszą z tylnych osi. W tym celu demontujemy głowice pomiarowe z osi kierowanej, montujemy je na pierwszej osi tylnej i przeprowadzamy kompensację bicia bocznego. Następnie ustawiamy pierwszą oś tylną względem osi bazowej. Rachunek zmarnowanych kosztów Teraz przeanalizujmy jeszcze dwa przykłady samochodów trójosiowych z typowymi wadami ustawienia kół, z punktu widzenia nadmiernego zużycia opon. W pierwszym mamy do czynienia z przypadkiem opisanym wcześniej jako wzajemne odchylenie obu osi tylnych. Samochód z tak zaburzoną geometrią może utrzymywać prostoliniowy kierunek jazdy jedynie wówczas, gdy koła przedniej osi kierowanej będą stale utrzymywane w pozycji silnie skręconej. Działanie trapezu kierowniczego sprawia z kolei, że koła kierowane będą wykazywać nadmierną zbieżność. W efekcie więc wszystkie koła (w sumie dziesięć) podczas jazdy na wprost toczyć się będą z silnym bocznym poślizgiem, zdzierającym bieżniki opon równie intensywnie, jak w trakcie ostrego hamowania, zwłaszcza na bocznych krawędziach. Drugi przykład to jednostronne przesunięcie pierwszej osi tylnej o 2,5 mm. Powoduje to takie same skutki jak opisany wcześniej kąt znoszenia, spowodowany analogicznym przesunięciem drugiej osi tylnej (bazowej). Taka, z pozoru drobna, usterka ma jednak bardzo poważny wpływ na zwiększenie kosztów eksploatacji całego pojazdu. |
|
|
Jeżeli jego przebieg roczny bez dokonania stosownej regulacji wyniesie 200 000 km, to sumaryczna wielkość bocznego znoszenia względem prostoliniowego kierunku jazdy osiągnie aż 200 km. Taki właśnie dystans musiałyby źle ustawione koła pokonać bocznym poślizgiem, gdyby tylko ich dotyczyła omawiana nieprawidłowość. W rzeczywistości jednak samochód z taką skośnie ustawioną osią ma tendencję do ściągania na jedną stronę. Kierowca koryguje to przez odpowiednie skręcenie kół przedniej osi kierowanej, przez co ich zbieżność znacznie się powiększa. Skorygowany kierunek jazdy sprawia, że skośnie względem niego ustawia się również tylna oś bazowa, mimo jej prawidłowej regulacji. Powtarza się więc sytuacja występująca w pierwszym z analizowanych przykładów: wszystkie koła toczą się z bocznym poślizgiem, który rozkłada się na nie równomiernie. Dzielimy w związku z tym 200 km na dziesięć i mamy 20 km intensywnego tarcia bieżnika o nawierzchnię, czyli dystans wystarczający z dużym nadmiarem do całkowitego zniszczenia opony. Wniosek: błędy ustawienia tylko jednej spośród trzech osi powodują przyspieszone zużywanie się opon wszystkich kół. Występujące tarcie zwiększa ogólne opory ruchu, czyli w konsekwencji także zużycie paliwa. Stałe poprzeczne obciążenie osi niszczy też w krótkim czasie kosztowne elementy zawieszenia i układu kierowniczego i zmniejsza bezpieczeństwo jazdy. |
W artykule wykorzystano materiały firmy Hunter.

0 komentarzy dodaj komentarz